-
比例控制 编辑
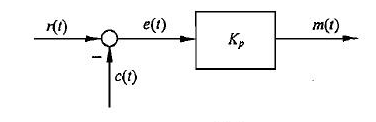
控制器的输出信号m(t)能够成比例地反应其输入信号e(t)。用数学式表达,即:m(t)=kpe(t)。式中,kp为比例系数。
P控制器实质上是一个具有可调增益的放大器。在信号变换过程中,P控制器只改变信号的增益而不影响其相位。在串联校正中,加大控制器增益Kp,可以提高系统的开环增益,减小系统稳态误差,从而提高系统的控制精度,但会降低系统的相对稳定性,甚至可能造成闭环系统不稳定。因此,在系统校正设计中,很少单独使用比例控制规律。
比例控制与积分控制结合(PI控制)
具有比例-积分控制规律的控制器,称PI控制器,其输出信号m(t)同时成比例地反应输入信号e(t)及其积分,即

式中,Kp为可调比例系数;Ti为可调积分时间常数。
 PI控制器
PI控制器
比例控制与微分控制结合(PD控制)
具有比例——微分控制规律的控制器,称为PD控制器,其输出m (t)与输入e(t)的关系如下式所示:

式中,Kp为比例系数;

PD控制器中的微分控制规律,能反应输入信号的变化趋势,产生有效的早期修正信号,以增加系统的阻尼程度,从而改善系统的稳定性。在串联校正时,可使系统增加一个

 PD控制器
PD控制器
比例、积分、微分控制结合(PID控制)
具有比例-积分-微分控制规律的控制器,称PID控制器。这种组合具有三种基本规律各自的特点,其运动方程为


与PI控制器相比,PID控制器除了同样具有提高系统的稳态性能的优点外,还多提供一个负实零点,从而在提高系统动态性能方面,具有更大的优越性。因此,在工业过程控制系统中,广泛使用PID控制器。PID控制器各部分参数的选择,在系统现场调试中最后确定。通常,应使I部分发生在系统频率特性的低频段,以提高系统的稳态性能;而使D部分发生在系统频率特性的中频段,以改善系统的动态性能。
 比例-微分控制系统
比例-微分控制系统